



据TechCrunch报道,叫车服务巨头Uber的一辆无人驾驶汽车在美国亚利桑那州坦佩市撞人致死。这是首次发生类似事件,肯定会比过去与无人驾驶汽车进行互动受到更仔细的审查。但从表面上看,我们很难理解,当整个汽车设计都是围绕着加强驾驶安全而进行的时候,这种事却偏偏发生了。
车道上突然出现障碍,这几乎是无人驾驶汽车工程师遇到的第一个紧急事件。这种情况似乎很多,包括停着的汽车、一只鹿或一个行人。而且,这些系统的所有设计都是为了尽早发现他们,识别出他们,并采取适当行动。这可能会促使汽车减速、停止、转向,或采取其他措施。
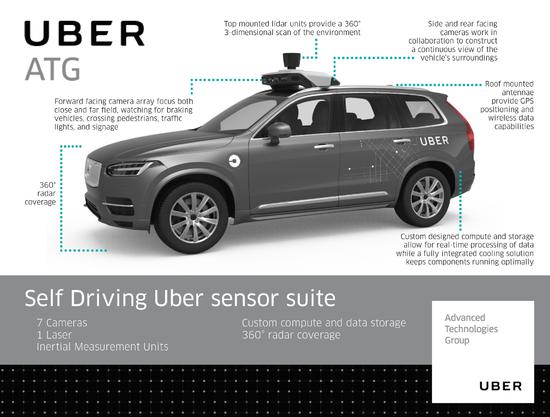
Uber的无人驾驶汽车配备了数套不同的成像系统,这些系统既可以正常工作,包括监视附近的车辆、标识和车道标记,还有像刚刚描述的那样执行特殊任务。在坦佩的交通意外中,Uber的无人驾驶系统至少有四种不同的方法能够发现受害者。
1.安装在车顶的激光雷达
在这些汽车顶部的斗形物体是激光雷达,或者是光探测和测距系统,它可以每秒多次产生汽车周围环境的三维图像。激光雷达利用红外激光脉冲反射物体,并将其信号传给传感器,它可以在白天或晚上以相当详细的方式探测到静止和移动的物体。
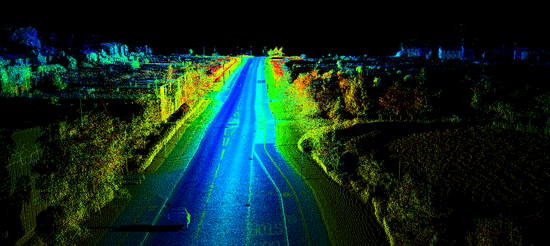
图2:这是激光雷达创建图像的例子,虽然不是特别确定Uber车辆会看到什么
暴雪或浓雾会导致激光雷达模糊,其准确率也会随着距离的延伸而降低,但从几米到几十米的范围内,激光雷达是非常棒的成像工具,几乎每辆无人驾驶汽车上都能找到它的身影。
如果操作正确,激光雷达装置应该能够辨认出引发问题的人,如果它们没有被完全遮挡住,即使在距离汽车几十米远的地方,并将障碍物的存在传递给“大脑”来整理图像。
2.前置雷达
雷达就像激光雷达那样,可以发射信号并等待它反弹回来,但是它使用的是无线电波而不是光。这使得雷达抵抗干扰的能力更强,因为无线电可以穿过雪和雾的阻碍,但这也降低了它的分辨率,并改变了它的覆盖范围。
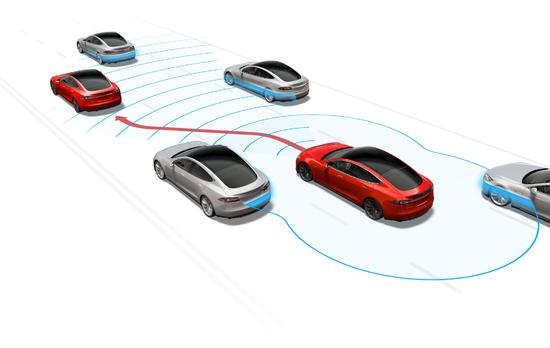
图3:特斯拉的自动驾驶系统(Autopilot)主要依靠雷达
根据不同位置的雷达装置,Uber的无人驾驶系统在前后两侧都可以提供360度覆盖范围。如果它是用来补充激光雷达的,很有可能会有很大的覆盖重叠,但是更多时候它们是用来识别其他车辆和更大障碍物的。
一个人的雷达信号不是那么容易辨认,但是它至少会有所显示,证实激光雷达的确探测到东西。
3.短程和远程光学摄像头
激光雷达和雷达对定位形状很有帮助,但它们在读取信号、判断颜色等方面则稍逊一筹。这就是可见光摄像头被引入的原因,它拥有复杂的计算机视觉算法,可实时在图像上运行。
Uber无人驾驶汽车上的摄像头处于报警模式,即可以观察到制动车辆(突然的红灯)、红绿灯、过路行人等的。尤其是在汽车的前端,会使用多种角度和类型的摄像头,从而可以获得汽车行驶场景的完整画面。
检测行人是最常见的计算机视觉问题之一,而且算法已经变得相当不错了。“分割”图像通常还包括识别符号、树木、人行道等。

话虽如此,无人驾驶汽车晚上分辨障碍物依然很难。但这是一个明显的问题,前两个系统已经提供解决方案,它们可以日夜工作。即使是在漆黑的环境中,穿着黑色衣服的人也会出现在激光雷达和雷达上,警告这辆车应该减速,并准备在车灯里看到那个人。这可能就是夜视系统在无人驾驶汽车中普遍存在的原因(我不能肯定Uber的车上没有这样的系统,但似乎不太可能)。
4.安全监督司机
把人称为系统可能听起来让我们感觉有点儿不舒服,但是这些坐在无人驾驶汽车中负责监督安全的人类驾驶员,却被视为“万能人类”。人们十分擅长发现事物,即使我们的眼睛里没有激光。我们的反应时间并不是最好的,但如果在明显情况下,汽车无法做出反应,或者做出了错误反应,受过严格训练的安全驾驶员会做出正确的反应。
值得一提的是,无人驾驶汽车中还有中央计算单元,它从上述来源获得输入信息,并在汽车周围创建更完整的世界场景。举例来说,某人可能会在系统传感器前消失在汽车后面,而汽车在一两秒内无法看到他,但这并不意味着他已经停止了存在。这不同于简单的对象识别,并开始引入更广泛的智能概念,如对象持久性、预测行为等。中央计算单元也可以说是任何无人驾驶汽车系统中最先进、最严密保护的部分。
目前尚不清楚这一悲剧发生的具体情况,但Uber的这辆车确实配备了诸多技术,应该可以提前发现行人,并让汽车做出适当的反应。此外,如果某个系统不起作用,其他系统应该已经能提供足够多的信息,多重故障反馈在高风险环境中非常实用,比如在公共道路上行驶。
来源:网易科技
责编:张凤娇
